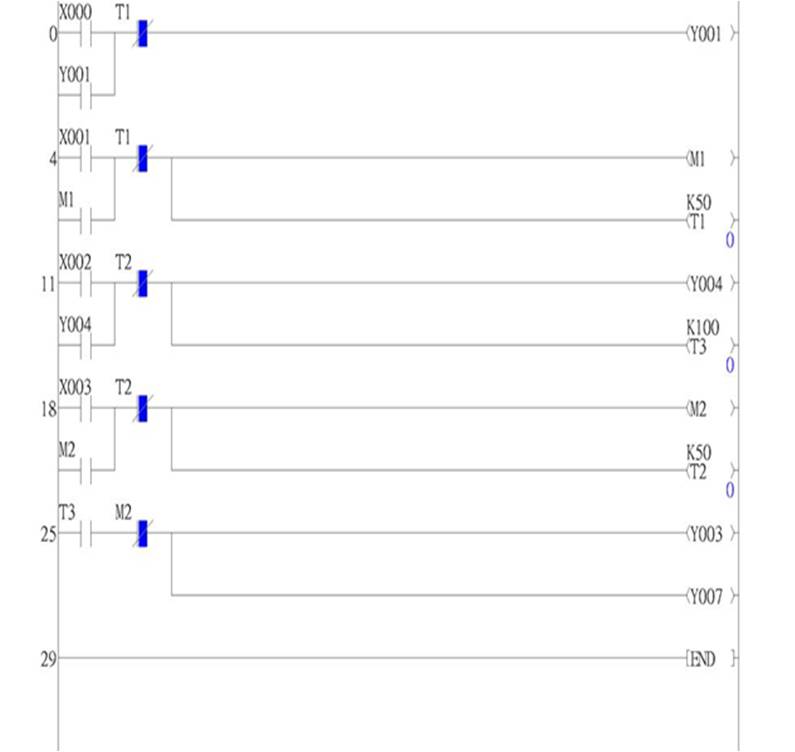
題目功能說明:
1.啟動X24開關後,輸送帶Y1正轉開始
2.操作者按下X20開關,即刻下達供給指令(Y0),此時會於輸送帶左側出現一個空箱子。
3.當空箱子經輸送帶至橘子供給機正下方,箱子檢測感測器(X1)感應後,即刻停止輸送帶運轉。
4.供給5個橘子到箱子,並把裝滿五個橘子的箱子輸送到右側托盤。
5.橘子的供給是依據橘子的供給指令(Y2),而橘子數量的檢測則依據橘子通過檢測之感應器(X2)來計數。
[程式碼]



y(n)+a1y(n-1)+a2y(n-2)+….+an-1y’+any=0.......................(1)
求得其解,因此非常了得。當然,所得的數值對照於原函數的真實解,完全吻合。
i’’(t)+3i’(t)+2i(t)=0...................(2)
假設其初值為i(0)=1(A) 且V(0)=2(V)
i(t)=-3e-t+4e-2t(A)...................(3)
上述(3)式即(2)之解。function dydt=fun(t,y)
%線性二階微分方程
dydt(1)=y(2);
dydt(2)=-3*y(2)-2*y(1);
dydt=dydt';
[ode.m]clear all
clc
[t,y]=ode45(@fun,[0 10],[1 -5]);
y1=y(:,1);
y2=y(:,2);
Z=-3*exp(-t)+4*exp(-2*t);
plot(t,y1,'r',t,y2,'g',t,Z,'b*')
[ode.m]程式碼中,Z為微分方程式的解,在本例中與ode所求得的y1做一比較。
[執行結果]